Following to 2022 first measurements & findings using XC vario, I have bought two TE probes from ESA systems last winter, to be flown & recorded over 2023 season.

- Venturi is the TE probes I have flown over years, it was my reference
- TE-RU is the "standart" bent TE antenna. It can be installed on tail either pointing up or down
- TE-DN is the double-head type of TE antenna. It can be installed either vertically either horizontally
It means the same glider can be flown in 5 differents TE Antenna configurations, for comparison purpose.
It is a bit difficult to judge from reading the instrument in flight what are the specificities for each arrangement. Still what could be nevertheless be seen is that pneumatic vario reading looked less jumpy in maneuver with either TE-RU or TE-DN in comparison to the reference TE-Venturi.
Let's see what we can learn from XC-vario recording.
As a standart maneuver, for each of the flights with a new antenna configuration I did perform a phugoid, which allows to cover a large range of airspeed in straight flight with minimum piloting input & with acceleration & deceleration.
 |
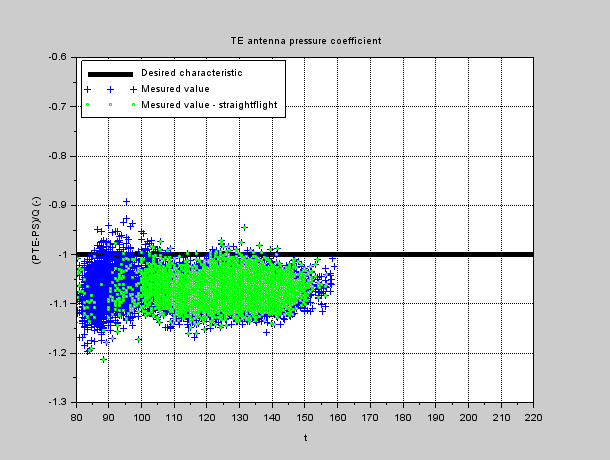
| Measured pressures during phugoid |
- To perfectly compensate speed variations in vario reading, from a theoretical point of view antenna pressure coefficient value should be equal to -1 .
- If pressure coefficient is above -1, antenna is undercompensating
- If pressure coefficient is below -1, antenna is overcompensating
(NB : the value of -0.95 is sometime stated as desired pressure coefficient value, based on pilot feedback from experiment)
Here are the results from measurements :
 |
| Antenna coefficient for the 5 configurations, in phugoid |
Since anemometric system for LS6 glider is carying only small speed errors (see link) - at least for symetric flight - PS & Q can be trusted & antenna coefficient can be considered in absolute.
The following trends can be observed:
- TE-Venturi is overcompensating, by about ~7% whatever speed (as from last year analysis)
- TE-RU gives a more exact compensation when pointing down, particularly for cruise flight speeds
- TE-RU tends to overcompensate at lower speeds when pointing up, and undercompensate when pointing down
- TE-DN gives a more exact compensation in cruise when set horizontally, while giving a more exact compensation in low speed range when set vertically.
- TE-DN tend to undercompensate at low speed when set horizontally, and over compensate in cruise speed when set vertically
Recording pressure signals over the full flights overs the opportunity for wider analysis. I have for example extracted the time history for the first thermal for flights with each configuration.
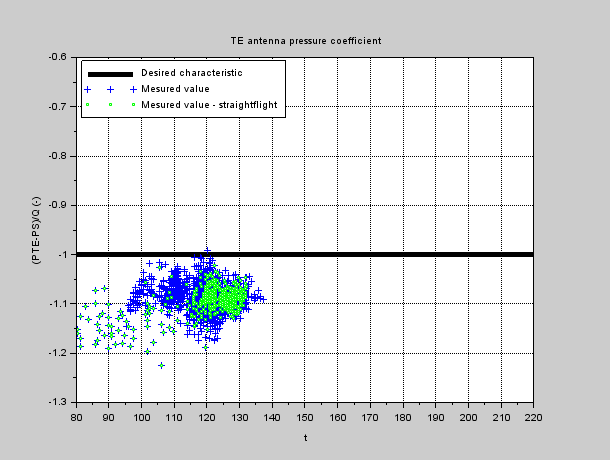
Here is the result from measurements :
 |
| Antenna coefficient for the 5 configurations, in circling |
The following trends can be observed:
- The whole range of pressure coefficients seems shifted in circling compared to straight flight : it could be caused either by antenna behavior, either by error in anemometric circuit for circling conditions - since PS is used as reference for evaluating pressure coefficient.
Second cause is likely the main driver, so it makes sense to only consider circling measurement for comparing antennas & not in absolute. - For both TE-RU & TE-DN, there is less compensation difference between antenna orientations in circling phases compared to straight flight.
- TE-DN is compensating less than TE-RU in circling flight
Based on circling analysis, antenna orientation seems less critical in circling than in straight flight, but it is difficult to state for sure which antenna configuration is better compensating, due to likely static circuit errors.
All in all, I think it is clear I will not fly anymore my TE-Venturi antenna : general feeling in flight & recordings analysis goes in same direction.
Further study on the noise over pressure measurement could help choosing between TE-RU & TE-DN antennas, but will require first to sort what comes from air bumpiness from the day versus antenna behavior in the observed signal. To be continued !